四.十字链表法存储有向图
十字链表法(Orthogonal List):有向图的高效存储方案
十字链表法是有向图的一种优化存储结构,结合了邻接表和逆邻接表的优势,既能快速访问顶点的出边(邻接表特性),也能快速访问入边(逆邻接表特性),是工程中存储有向图的核心方案之一。本文从核心原理、结构设计、代码实现到特性分析,全面讲解十字链表法。
1、核心概念
1. 定义
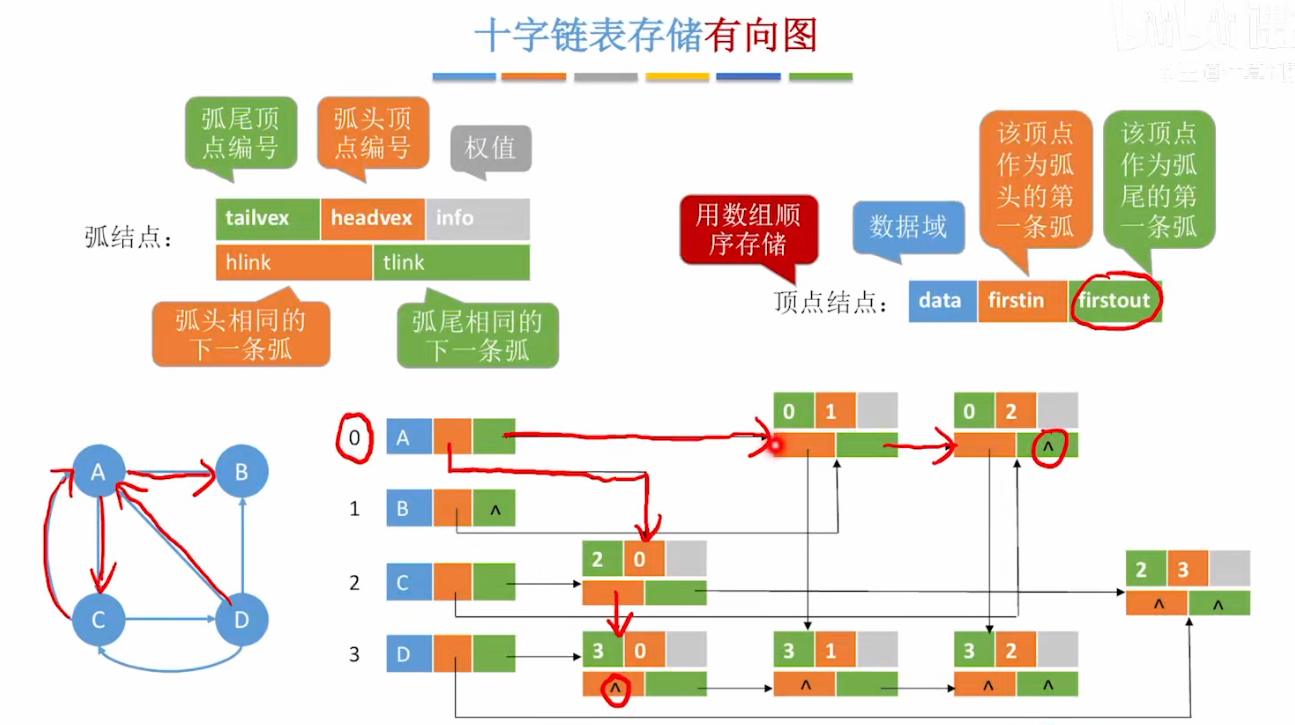
十字链表法通过「顶点表 + 边表」的组合结构存储有向图:
- 顶点表:一维数组存储所有顶点,每个顶点节点包含「顶点值」「第一个出边指针」「第一个入边指针」;
- 边表:链表结构存储所有有向边,每个边节点包含「起点索引(tailvex)」「终点索引(headvex)」「同起点下一条出边指针(hlink)」「同终点下一条入边指针(tlink)」,若为带权图可新增「权重(weight)」字段。
2. 核心解决的问题
有向图的传统存储方案存在明显短板:
- 邻接表:快速查出边,但查入边需遍历所有顶点的邻接链表(时间复杂度O(n+e));
- 逆邻接表:快速查入边,但查出边效率低;
- 十字链表:同时整合出边/入边的访问能力,空间复杂度与邻接表相当,且兼顾两类查询效率。
3. 核心术语
| 术语 | 说明 |
|---|---|
| 顶点表节点 | 存储顶点值 + 指向该顶点「第一条出边」的指针 + 指向该顶点「第一条入边」的指针 |
| 边表节点 | 存储起点索引(tailvex)、终点索引(headvex)、同起点下一出边(hlink)、同终点下一入边(tlink) |
| 出边链表 | 同一顶点作为起点的所有边,通过hlink指针串联(对应邻接表的出边链) |
| 入边链表 | 同一顶点作为终点的所有边,通过tlink指针串联(对应逆邻接表的入边链) |
2、结构设计(核心)
1. 顶点表节点结构
// 十字链表的顶点表节点
typedef struct VexNode {
int data; // 顶点值(可替换为char/自定义类型)
struct ArcNode *firstin; // 指向该顶点的第一条入边
struct ArcNode *firstout;// 指向该顶点的第一条出边
} VexNode;
2. 边表节点结构
// 十字链表的边表节点(有向边)
typedef struct ArcNode {
int tailvex; // 边的起点(尾顶点)在顶点表中的索引
int headvex; // 边的终点(头顶点)在顶点表中的索引
struct ArcNode *hlink; // 指向同起点的下一条出边(出边链表的后继)
struct ArcNode *tlink; // 指向同终点的下一条入边(入边链表的后继)
// int weight; // 带权图新增:边的权重
} ArcNode;
3. 十字链表整体结构
// 十字链表(有向图)
typedef struct {
VexNode xList[MAX_VERTEX_NUM]; // 顶点表(十字链表的核心数组)
int vexnum, arcnum; // 顶点数、边数
} OLGraph;
4. 结构示意图(有向图示例)
以有向图 0→1,0→2,1→2 为例,十字链表的结构如下:
顶点表(数组):
索引0 → 顶点值0 → firstout→边(0→1) → hlink→边(0→2) → NULL
→ firstin→NULL(无入边)
索引1 → 顶点值1 → firstout→边(1→2) → NULL
→ firstin→边(0→1) → NULL
索引2 → 顶点值2 → firstout→NULL(无出边)
→ firstin→边(0→2) → tlink→边(1→2) → NULL
边表节点:
边(0→1):tailvex=0,headvex=1 → hlink=边(0→2),tlink=NULL
边(0→2):tailvex=0,headvex=2 → hlink=NULL,tlink=边(1→2)
边(1→2):tailvex=1,headvex=2 → hlink=NULL,tlink=NULL
3、完整代码实现(C语言)
1. 基础定义与辅助函数
#include <stdio.h>
#include <stdlib.h>
#define MAX_VERTEX_NUM 100 // 最大顶点数
// 边表节点(前置声明,解决指针引用问题)
struct ArcNode;
// 顶点表节点
typedef struct VexNode {
int data;
struct ArcNode *firstin;
struct ArcNode *firstout;
} VexNode;
// 边表节点
typedef struct ArcNode {
int tailvex; // 起点索引
int headvex; // 终点索引
struct ArcNode *hlink;
struct ArcNode *tlink;
// int weight; // 带权图可启用
} ArcNode;
// 十字链表结构
typedef struct {
VexNode xList[MAX_VERTEX_NUM];
int vexnum, arcnum;
} OLGraph;
// 辅助函数:根据顶点值查找其在顶点表中的索引
int LocateVex(OLGraph *G, int v) {
for (int i = 0; i < G->vexnum; i++) {
if (G->xList[i].data == v) {
return i;
}
}
return -1; // 顶点不存在
}
2. 核心操作:初始化十字链表
// 初始化十字链表(有向图)
void InitOLGraph(OLGraph *G) {
printf("请输入有向图的顶点数和边数:");
scanf("%d%d", &G->vexnum, &G->arcnum);
// 步骤1:初始化顶点表
for (int i = 0; i < G->vexnum; i++) {
printf("请输入顶点%d的值:", i);
scanf("%d", &G->xList[i].data);
G->xList[i].firstin = NULL; // 初始无入边
G->xList[i].firstout = NULL; // 初始无出边
}
// 步骤2:初始化边表(逐条添加有向边)
for (int k = 0; k < G->arcnum; k++) {
int v1, v2;
printf("请输入有向边<v1, v2>的起点和终点值:");
scanf("%d%d", &v1, &v2);
// 查找顶点对应的索引(tail=起点索引,head=终点索引)
int tail = LocateVex(G, v1);
int head = LocateVex(G, v2);
if (tail == -1 || head == -1) {
printf("顶点不存在,重新输入该边!\n");
k--; // 回退,重新输入
continue;
}
// 步骤2.1:创建新的边表节点
ArcNode *p = (ArcNode *)malloc(sizeof(ArcNode));
p->tailvex = tail;
p->headvex = head;
p->hlink = NULL;
p->tlink = NULL;
// p->weight = w; // 带权图需输入权重并赋值
// 步骤2.2:将新边插入「起点tail的出边链表」(头插法)
// 逻辑:新边的hlink指向tail原firstout,再更新tail的firstout为新边
p->hlink = G->xList[tail].firstout;
G->xList[tail].firstout = p;
// 步骤2.3:将新边插入「终点head的入边链表」(头插法)
// 逻辑:新边的tlink指向head原firstin,再更新head的firstin为新边
p->tlink = G->xList[head].firstin;
G->xList[head].firstin = p;
}
}
3. 遍历操作:输出顶点的出边/入边
// 遍历十字链表:输出每个顶点的出边和入边
void PrintOLGraph(OLGraph *G) {
printf("\n===== 十字链表遍历结果 =====\n");
for (int i = 0; i < G->vexnum; i++) {
printf("顶点%d(值:%d):\n", i, G->xList[i].data);
// 输出出边(firstout + hlink)
printf(" 出边:");
ArcNode *p_out = G->xList[i].firstout;
if (p_out == NULL) {
printf("无");
} else {
while (p_out != NULL) {
printf("<%d, %d> ", G->xList[p_out->tailvex].data, G->xList[p_out->headvex].data);
p_out = p_out->hlink;
}
}
// 输出入边(firstin + tlink)
printf("\n 入边:");
ArcNode *p_in = G->xList[i].firstin;
if (p_in == NULL) {
printf("无");
} else {
while (p_in != NULL) {
printf("<%d, %d> ", G->xList[p_in->tailvex].data, G->xList[p_in->headvex].data);
p_in = p_in->tlink;
}
}
printf("\n");
}
}
4. 扩展操作:统计顶点的出度/入度
// 统计单个顶点的出度和入度
void CountDegree(OLGraph *G, int v) {
int idx = LocateVex(G, v);
if (idx == -1) {
printf("顶点%d不存在!\n", v);
return;
}
// 出度:出边链表的长度
int out_degree = 0;
ArcNode *p_out = G->xList[idx].firstout;
while (p_out != NULL) {
out_degree++;
p_out = p_out->hlink;
}
// 入度:入边链表的长度
int in_degree = 0;
ArcNode *p_in = G->xList[idx].firstin;
while (p_in != NULL) {
in_degree++;
p_in = p_in->tlink;
}
printf("顶点%d的出度:%d,入度:%d\n", v, out_degree, in_degree);
}
5. 测试主函数
int main() {
OLGraph G;
InitOLGraph(&G); // 初始化十字链表
PrintOLGraph(&G); // 遍历输出
// 统计指定顶点的度
int target;
printf("\n请输入要统计度的顶点值:");
scanf("%d", &target);
CountDegree(&G, target);
// 释放内存(可选,避免内存泄漏)
// 思路:遍历所有边节点,逐个free
for (int i = 0; i < G.vexnum; i++) {
ArcNode *p = G.xList[i].firstout;
while (p != NULL) {
ArcNode *q = p;
p = p->hlink;
free(q);
}
}
return 0;
}
6. 带权图扩展(仅修改核心代码)
若需存储带权有向图,仅需:
- 在
ArcNode中新增weight字段; - 初始化边时输入权重并赋值:
// 输入时新增权重
int v1, v2, w;
printf("请输入有向边<v1, v2>的起点、终点和权重:");
scanf("%d%d%d", &v1, &v2, &w);
p->weight = w; - 遍历输出时补充权重:
printf("<%d, %d, %d> ", ..., p_out->weight);
4、关键特性分析
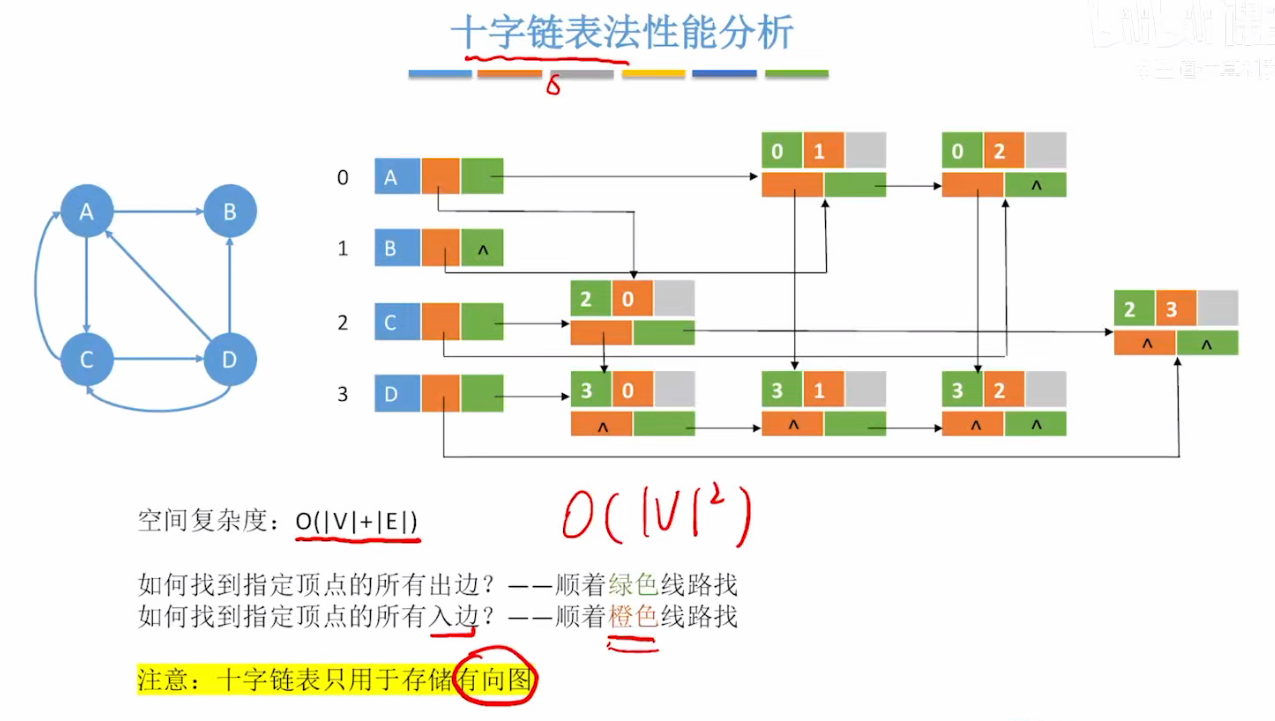
1. 空间复杂度
- 顶点表:
O(n)(n为顶点数); - 边表:
O(e)(e为边数,每条边仅存储一次); - 总空间复杂度:
O(n + e),与邻接表完全一致,无额外空间开销。
2. 时间复杂度
| 操作 | 时间复杂度 | 说明 |
|---|---|---|
| 查顶点的所有出边 | O(出度) | 直接遍历firstout + hlink |
| 查顶点的所有入边 | O(入度) | 直接遍历firstin + tlink |
| 统计出度/入度 | O(出度/入度) | 遍历对应链表 |
| 查找指定边<v1,v2> | O(出度(v1)) | 遍历v1的出边链表 |
| 图的遍历(DFS/BFS) | O(n + e) | 与邻接表效率一致 |
| 新增边 | O(1) | 头插法直接插入出边/入边链表 |
3. 优缺点对比
| 优点 | 缺点 |
|---|---|
| 同时高效访问出边/入边 | 实现比单纯邻接表复杂(需维护两个链表) |
| 空间效率与邻接表一致 | 查找指定边仍需遍历出边链表 |
| 适配有向图的各类操作 | 增删顶点需调整所有相关边的索引 |
| 支持带权图扩展 | 指针管理易出错(需注意内存泄漏) |
5、工程应用场景
- 有向图的核心算法:如拓扑排序、关键路径(CPM)、有向无环图(DAG)的最短路径,需同时访问入边/出边;
- 编译器优化:存储程序的控制流图(CFG),分析指令的依赖关系(入边=前驱指令,出边=后继指令);
- 网络路由:存储有向网络拓扑(如单向链路),同时统计入站/出站流量;
- 依赖分析:如项目管理中的任务依赖(A→B表示A依赖B),快速查某任务的前置依赖(入边)和后置任务(出边)。
6、与邻接表/逆邻接表的对比
| 存储方案 | 出边访问 | 入边访问 | 空间复杂度 | 适用场景 |
|---|---|---|---|---|
| 邻接表 | 高效 | 低效 | O(n+e) | 仅需频繁查出边的有向图 |
| 逆邻接表 | 低效 | 高效 | O(n+e) | 仅需频繁查入边的有向图 |
| 十字链表 | 高效 | 高效 | O(n+e) | 需同时查出入边的有向图 |
选择原则:
- 仅需处理出边(如单纯的DFS/BFS)→ 邻接表;
- 仅需处理入边(如统计入度)→ 逆邻接表;
- 需同时处理出边+入边(如拓扑排序、关键路径)→ 十字链表(最优选择)。