三.邻接表法
邻接表演示
→
邻接表法(Adjacency List)知识点全解析
邻接表法是图的核心存储方式之一,与邻接矩阵法并列,因空间效率高、适配稀疏图等特点,成为工程中最常用的图存储方案。本文从核心概念、结构设计、代码实现到优劣分析,全面讲解邻接表法的知识点。
1、核心概念
1. 定义
邻接表法通过「数组 + 链表」的组合结构存储图:
- 顶点表:用一维数组存储图中所有顶点的基本信息(如顶点值、索引);
- 边表(邻接链表):数组中每个顶点对应一条链表,链表节点存储该顶点的邻接点索引及边的附加信息(如权重、方向)。
2. 适用场景
- 稀疏图(顶点多、边少):空间效率远高于邻接矩阵(邻接矩阵会浪费大量空位置);
- 需频繁遍历邻接点的场景(如图的遍历、最短路径算法);
- 动态增删顶点/边的场景(链表结构支持高效插入删除)。
3. 核心术语
| 术语 | 说明 |
|---|---|
| 顶点表节点 | 存储顶点值 + 指向该顶点第一条邻接边的指针 |
| 边表节点 | 存储邻接点的索引 + 指向下一个邻接边的指针(若为带权图,新增权重字段) |
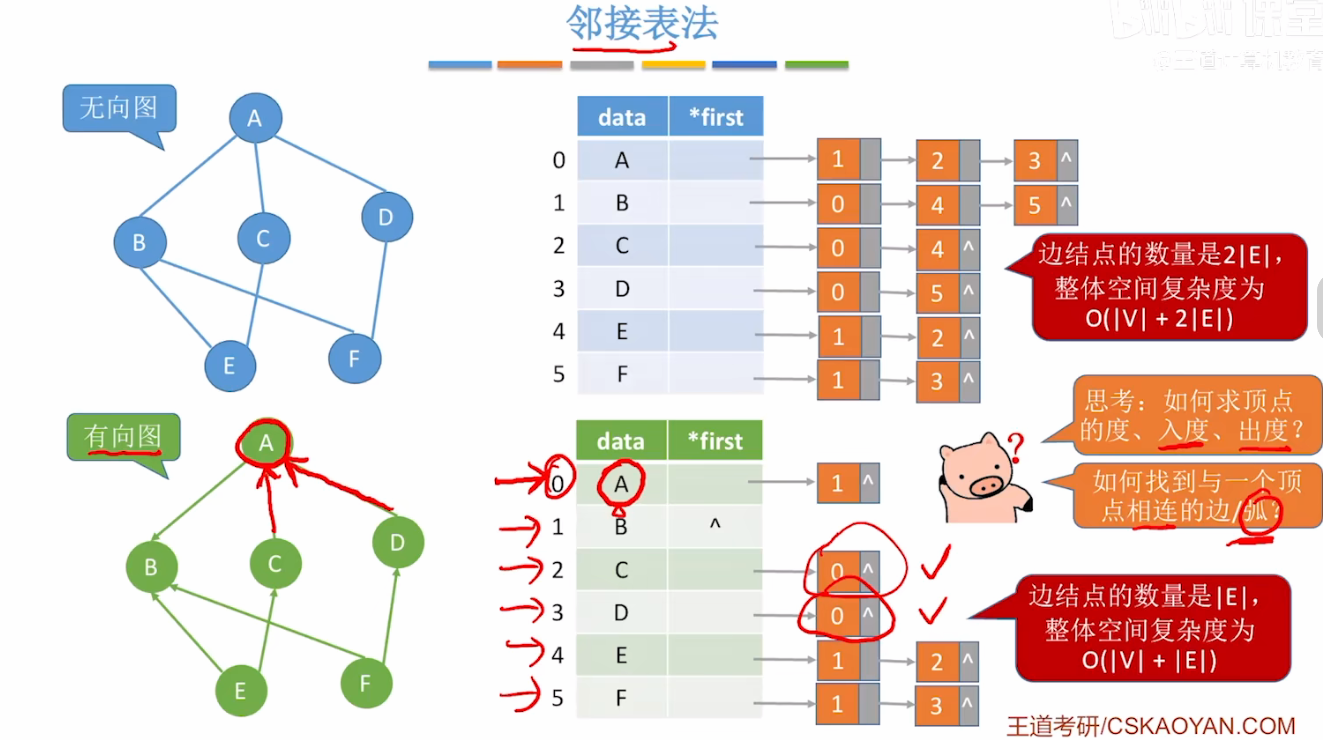
| 出度/入度 | 有向图中,顶点的出度 = 对应链表长度;入度需遍历所有链表统计 |
2、结构设计(无向图 vs 有向图 vs 带权图)
1. 无向图的邻接表
无向图中,边 (v1, v2) 会被存储两次:
- v1 的邻接链表中添加 v2;
- v2 的邻接链表中添加 v1。
示例:无向图 0-1-2,0-2 的邻接表结构:
顶点表(数组):
索引 0 → 顶点值 0 → 边表:1 → 2 → NULL
索引 1 → 顶点值 1 → 边表:0 → 2 → NULL
索引 2 → 顶点值 2 → 边表:0 → 1 → NULL
2. 有向图的邻接表
有向图中,边 <v1, v2> 仅存储一次:
- 仅在 v1 的邻接链表中添加 v2(表示从 v1 指向 v2)。
示例:有向图 0→1,1→2,0→2 的邻接表结构:
顶点表(数组):
索引 0 → 顶点值 0 → 边表:1 → 2 → NULL
索引 1 → 顶点值 1 → 边表:2 → NULL
索引 2 → 顶点值 2 → 边表:NULL
3. 带权图的邻接表
仅需在边表节点中新增「权重」字段,其余结构与无向/有向图一致。
示例:带权无向图 0-1(权重5),1-2(权重3) 的邻接表结构:
顶点表(数组):
索引 0 → 顶点值 0 → 边表:(邻接点1, 权重5) → NULL
索引 1 → 顶点值 1 → 边表:(邻接点0, 权重5) → (邻接点2, 权重3) → NULL
索引 2 → 顶点值 2 → 边表:(邻接点1, 权重3) → NULL
3、完整代码实现(C语言)
1. 基础结构定义(无向图)
#include <stdio.h>
#include <stdlib.h>
#define MAX_VERTEX_NUM 100 // 最大顶点数
// 边表节点(存储邻接点索引 + 下一个边节点指针)
typedef struct ArcNode {
int adjvex; // 邻接点在顶点表中的索引
struct ArcNode *nextarc; // 指向下一个邻接边节点
} ArcNode;
// 顶点表节点(存储顶点值 + 指向第一条邻接边的指针)
typedef struct VNode {
int data; // 顶点值(可替换为char/自定义类型)
ArcNode *firstarc; // 指向该顶点的第一条邻接边
} VNode;
// 邻接表结构(顶点表数组 + 顶点数 + 边数)
typedef struct {
VNode adjList[MAX_VERTEX_NUM];
int vexnum, arcnum; // 顶点数、边数
} ALGraph;
2. 核心操作实现
(1)初始化图
// 查找顶点值对应的索引(辅助函数)
int LocateVex(ALGraph *G, int v) {
for (int i = 0; i < G->vexnum; i++) {
if (G->adjList[i].data == v) {
return i;
}
}
return -1; // 顶点不存在
}
// 初始化邻接表(无向图)
void InitGraph(ALGraph *G) {
printf("请输入顶点数和边数:");
scanf("%d%d", &G->vexnum, &G->arcnum);
// 1. 初始化顶点表
for (int i = 0; i < G->vexnum; i++) {
printf("请输入顶点%d的值:", i);
scanf("%d", &G->adjList[i].data);
G->adjList[i].firstarc = NULL; // 初始无邻接边
}
// 2. 初始化边表(无向图,每条边存两次)
for (int k = 0; k < G->arcnum; k++) {
int v1, v2;
printf("请输入边(v1, v2)的两个顶点值:");
scanf("%d%d", &v1, &v2);
// 查找顶点对应的索引
int i = LocateVex(G, v1);
int j = LocateVex(G, v2);
if (i == -1 || j == -1) {
printf("顶点不存在,跳过该边!\n");
k--; // 重新输入该边
continue;
}
// ① 为v1添加邻接点v2(头插法,效率更高)
ArcNode *p1 = (ArcNode *)malloc(sizeof(ArcNode));
p1->adjvex = j;
p1->nextarc = G->adjList[i].firstarc;
G->adjList[i].firstarc = p1;
// ② 为v2添加邻接点v1(无向图特性)
ArcNode *p2 = (ArcNode *)malloc(sizeof(ArcNode));
p2->adjvex = i;
p2->nextarc = G->adjList[j].firstarc;
G->adjList[j].firstarc = p2;
}
}
(2)遍历邻接表(输出所有顶点和邻接点)
void PrintGraph(ALGraph *G) {
printf("\n邻接表遍历结果:\n");
for (int i = 0; i < G->vexnum; i++) {
printf("顶点%d(值:%d)的邻接点:", i, G->adjList[i].data);
ArcNode *p = G->adjList[i].firstarc;
while (p != NULL) {
printf("%d ", G->adjList[p->adjvex].data);
p = p->nextarc;
}
printf("\n");
}
}
(3)深度优先遍历(DFS)
// 访问标记数组(全局变量,初始为0)
int visited[MAX_VERTEX_NUM] = {0};
// 访问顶点(可自定义逻辑,此处仅打印)
void Visit(int v) {
printf("%d ", v);
}
// 深度优先遍历(从顶点v出发)
void DFS(ALGraph *G, int v) {
Visit(G->adjList[v].data); // 访问当前顶点
visited[v] = 1; // 标记为已访问
// 遍历所有邻接点
ArcNode *p = G->adjList[v].firstarc;
while (p != NULL) {
int w = p->adjvex; // 邻接点索引
if (!visited[w]) { // 未访问则递归
DFS(G, w);
}
p = p->nextarc;
}
}
// 遍历整个图(处理非连通图)
void DFSTraverse(ALGraph *G) {
printf("\n深度优先遍历结果:");
// 重置访问标记
for (int i = 0; i < G->vexnum; i++) {
visited[i] = 0;
}
// 对未访问的顶点执行DFS
for (int i = 0; i < G->vexnum; i++) {
if (!visited[i]) {
DFS(G, i);
}
}
printf("\n");
}
(4)测试主函数
int main() {
ALGraph G;
InitGraph(&G); // 初始化图
PrintGraph(&G); // 输出邻接表
DFSTraverse(&G); // 深度优先遍历
// 释放内存(可选,避免内存泄漏)
for (int i = 0; i < G.vexnum; i++) {
ArcNode *p = G->adjList[i].firstarc;
while (p != NULL) {
ArcNode *q = p;
p = p->nextarc;
free(q);
}
}
return 0;
}
3. 带权图的扩展(仅修改边表节点)
若需存储带权图,仅需修改边表节点结构,核心逻辑不变:
// 带权图的边表节点
typedef struct ArcNode {
int adjvex; // 邻接点索引
int weight; // 边的权重
struct ArcNode *nextarc; // 下一个边节点
} ArcNode;
// 初始化边表时新增权重输入
printf("请输入边(v1, v2)的两个顶点值和权重:");
scanf("%d%d%d", &v1, &v2, &weight);
p1->weight = weight;
p2->weight = weight;
4、关键特性分析
1. 空间复杂度
- 顶点表:
O(n)(n 为顶点数); - 边表:无向图
O(2e),有向图O(e)(e 为边数); - 总空间复杂度:
O(n + e)(稀疏图下远优于邻接矩阵的O(n²))。
2. 时间复杂度
| 操作 | 时间复杂度 | 说明 |
|---|---|---|
| 查找顶点的邻接点 | O(度(v)) | 度(v)为顶点v的邻接边数 |
| 查找任意边 (v1,v2) | O(度(v1)) | 需遍历v1的邻接链表 |
| 图的遍历(DFS/BFS) | O(n + e) | 访问所有顶点和边 |
| 增删边 | O(1) | 头插法直接插入,无需遍历 |
| 增删顶点 | O(n + e) | 需调整顶点表索引,并重排邻接链表 |
3. 优缺点对比
| 优点 | 缺点 |
|---|---|
| 空间效率高(适配稀疏图) | 查找任意边效率低(需遍历链表) |
| 遍历邻接点速度快 | 有向图统计入度需遍历所有链表 |
| 动态增删边/顶点更灵活 | 实现比邻接矩阵复杂(需处理链表指针) |
5、工程应用场景
- 社交网络:存储用户(顶点)和好友关系(边),快速查询某用户的所有好友;
- 路由算法:存储网络节点(顶点)和链路(边),实现最短路径计算;
- 编译器:存储语法树/依赖图,分析代码依赖关系;
- 游戏开发:存储游戏场景中的角色(顶点)和交互关系(边),实现AI路径规划。
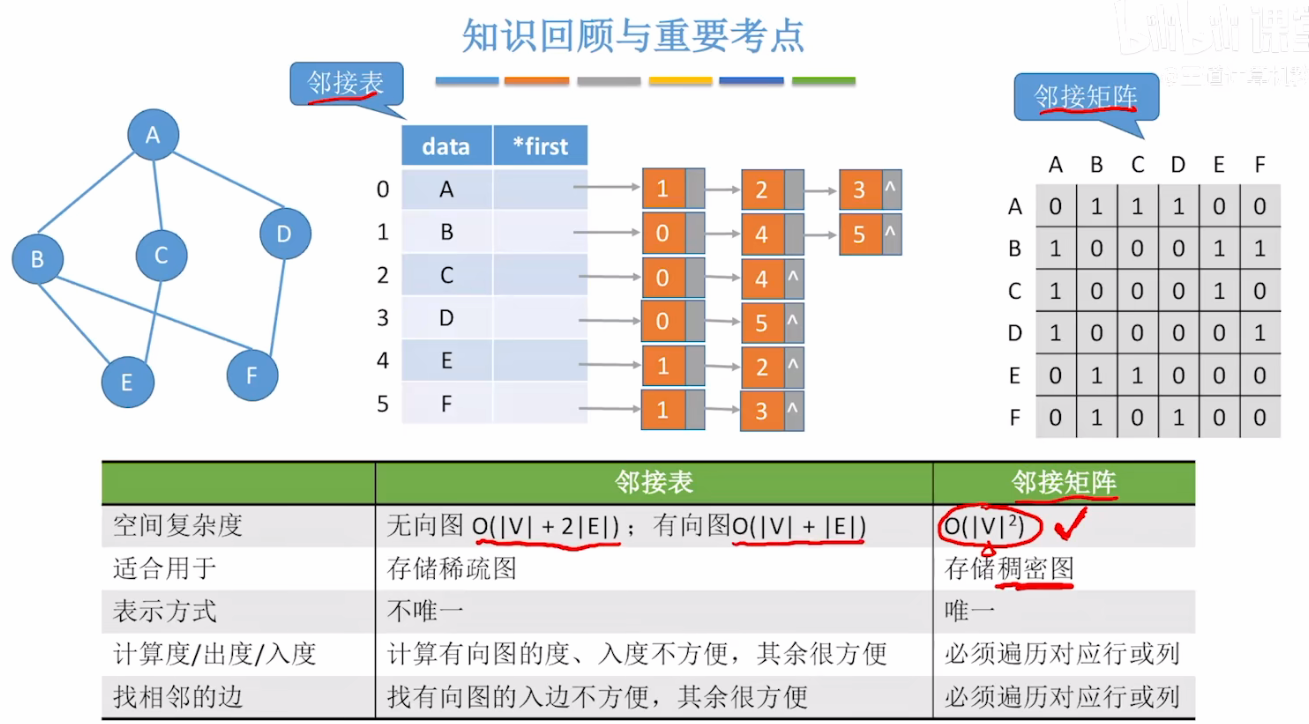
6、与邻接矩阵的核心区别
| 维度 | 邻接表法 | 邻接矩阵法 |
|---|---|---|
| 空间效率 | 稀疏图占优(O(n+e)) | 稠密图占优(O(n²)) |
| 查找边 | 慢(O(度(v))) | 快(O(1)) |
| 遍历邻接点 | 快(直接遍历链表) | 慢(需遍历整行) |
| 实现复杂度 | 较高(链表操作) | 较低(二维数组) |
| 动态扩展性 | 强(链表增删灵活) | 弱(数组大小固定) |
选择原则:
- 稀疏图(边数 e ≤ nlogn)→ 优先选邻接表;
- 稠密图(边数接近 n²)→ 优先选邻接矩阵;
- 需频繁查边 → 选邻接矩阵;
- 需频繁遍历邻接点 → 选邻接表.