十.最短路径问题
1.BFS算法
BFS 最短路径
(1)代码
//求顶点u到其他顶点的最短路径
void BFS_MIN_Distance(Graph G,int u){
//d[i]表示从u到i结点的最短路径
for(i=0;i<G.vexnum;++i){
d[i]=∞; //初始化路径长度
path[i]=-1; //最短路径从哪个顶点过来
}
d[u]=0;
visited[u]=TRUE;
EnQueue(Q,u);
while(!isEmpty(Q)){ //BFS算法主过程
DeQueue(Q,u); //队头元素u出队
for(w=FirstNeighbor(G,u);w>=0;w=NextNeighbor(G,u,w))
if(!visited[w]){ //w为u的尚未访问的邻接顶点
d[w]=d[u]+1; //路径长度加1
path[w]=u; //最短路径应从u到w
visited[w]=TRUE; //设已访问标记
EnQueue(Q,w); //顶点w入队
}//if
}//while
}
(2)图解代码
相比与BFS算法的直接使用,求最短路径问题多了两个数组:d[i],path[i]
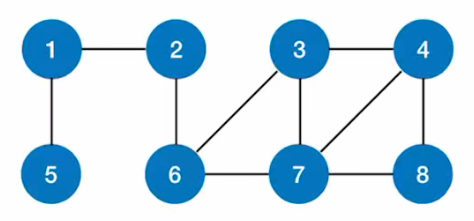 例如:我们求从2号顶点到其他顶点的最短路径;
例如:我们求从2号顶点到其他顶点的最短路径;
- 首先,初始化两个数组:
d[i]=∞; path[i]=-1;
- 然后,将 d[2]=0;(因为2号顶点到2号顶点距离为0);
--d[u]=0; - 然后,像广度优先遍历一样,2号顶点已经被标记过了,将其 visit 值设为 True ;再放入数组中;
--visited[u]=TRUE; EnQueue(Q,u); - 接下来执行 while 循环,如果队列非空,则弹出队头元素:2;
- 然后再进行 for 循环,找到和2相邻的所有顶点;
- 如果该邻接顶点没有被访问过(即 visit 值为False),则路径长度+1;
d[w]=d[u]+1=d[2]+1=0+1=1;所以将d[1]和d[6]的值都改为1; - 还需要记录 path 数组;1和6的最短路径都是由2过来的;所以
path[1]=path[6]=2; 还需将1,6的 visit 值改为 True;
还需将1,6的 visit 值改为 True;
继续进行 while 循环,访问1号顶点;
- 将队头元素:2弹出队列;此时应该访问1的邻接顶点

- 第一个找到的是2号顶点,visit值为True;跳过
- 访问5号顶点:最短路径长度=1号顶点的最短路径长度+1;
d[5]=d[1]+1=2; - path[5]=1;
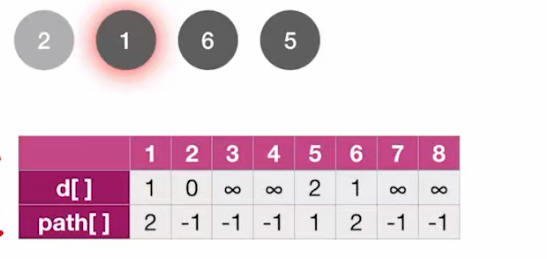
继续处理6号顶点:
- 6号顶点的邻接顶点为3,7;path[3]=path[7]=6;
d[3]=d[7]=d[6]+1=3;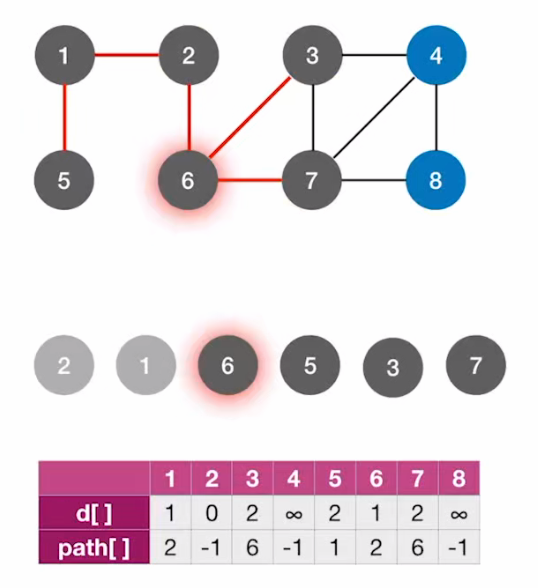
接下来处理5号顶点:
- 5号顶点的所有邻接顶点都被访问过了;跳过;
最终得到: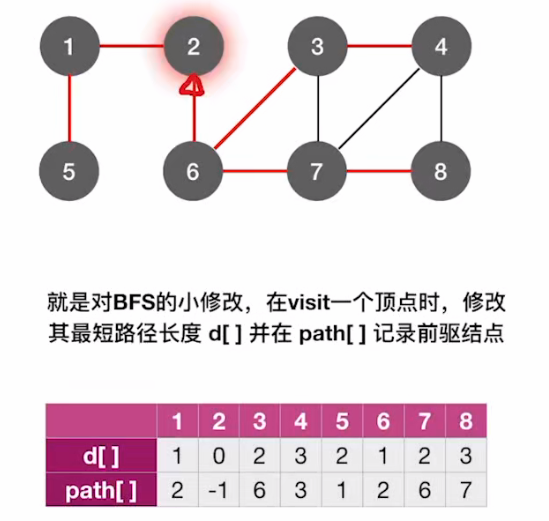
由上图可知:
2->8的最短路径长度=d[8]=3;
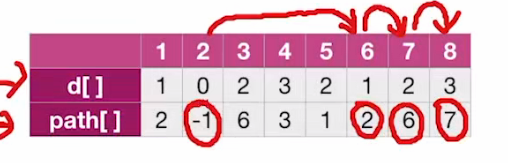
- 8号顶点对应的path值为7;
- 7的path值为6;
- 6的path值为2;
综上:2->6->7->8为最短路径
其实在前面我们构造过广度优先生成树,可以通过观察生成树来得到最短路径.
2.Dijkstra算法
Dijkstra 最短路径
(1)初始化操作
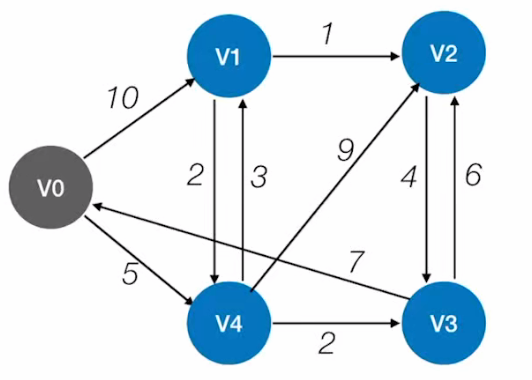
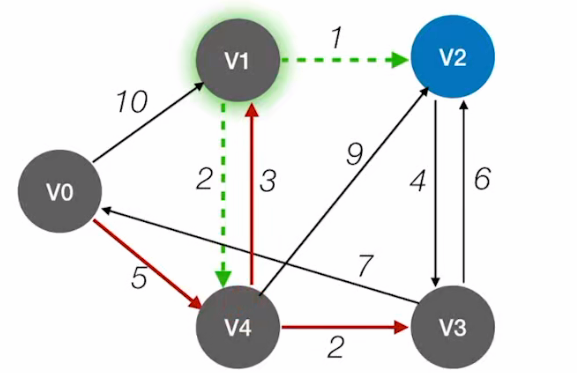
如图所示:
我们从V0开始寻找到各个顶点的最短路径;
首先,初始化三个数组:

dist数组表示:目前为止可以找到的最短的一条路径长度为多少;
- 首先,V0到自己的最短路径肯定为0;
- 刚开始,我们可以找到一条
V0->V1的边,长度为10;V0->V4,长度为5; - V2,V3并不存在直接从V0过来的边;所以最短路径长度
设为∞;
path数组表示:最短路径上的前驱;
- 所以将V1,V4的path值设为0;
(2)图解代码
第 1 轮:循环遍历所有结点,找到还没确定最短路径、且 dist 最小的顶点 Vi,令 final [i]=ture。
根据初始化的 dist 数组,第1轮遍历的最短路径为5;对应的顶点为V4;将其 final 值设为 True;
检查所有邻接自 Vi 的顶点,若其 final 值为 false,则更新 dist 和 path 信息
查看与V4相邻的顶点:V1,V2,V3;
这些顶点的final值都为False;
先看V1:
如果从V0->V4->V1会不会比V0->V4更短呢?
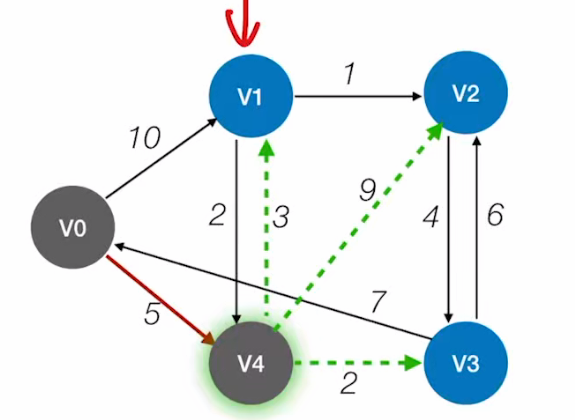 由图可知:
V0->V4->V1=5+3=8;
V0->V4=10;
由图可知:
V0->V4->V1=5+3=8;
V0->V4=10;
所以,将V1的dist值改为8,path值改为4
此时发现,V0->V4->V2=5+9=14;
所以,将V2的dist值改为14,path值改为4
同理:
所以,将V3的dist值改为7,path值改为4

第 2 轮:循环遍历所有结点,找到还没确定最短路径、且 dist 最小的顶点 Vi,令 final [i]=ture。
查看dist数组,其中最小的顶点为V3; 令final[V3]=true;
检查所有邻接自 Vi 的顶点,若其 final 值为 false,则更新 dist 和 path 信息
接下来检查所有可以从V3经过的顶点
此时发现:
V0->V4->V3->V2=5+2+6=13<14;
所以,将V2的dist值改为13,path值改为3

第 3 轮:循环遍历所有结点,找到还没确定最短路径、且 dist 最小的顶点 Vi,令 final [i]=ture。
此时dist最小值的顶点为V1,令final[V1]=true;
检查V1的邻接顶点,为V2,V4;
其中V4的最短路径已经确定;只需检查V2;
此时发现:
V0->V4->V1->V2=dist[V1]+1=9;
所以,将V2的dist值改为9,path值改为1
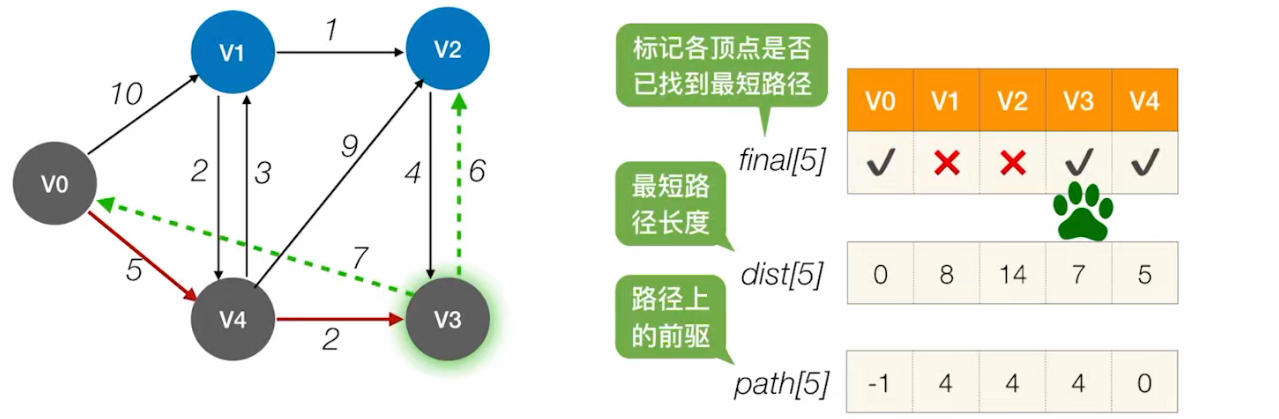
第 4 轮:循环遍历所有结点,找到还没确定最短路径、且 dist 最小的顶点 Vi,令 final [i]=ture。
最后只剩下V2顶点,
但是找不到final值为False的顶点了;
算法到此结束.
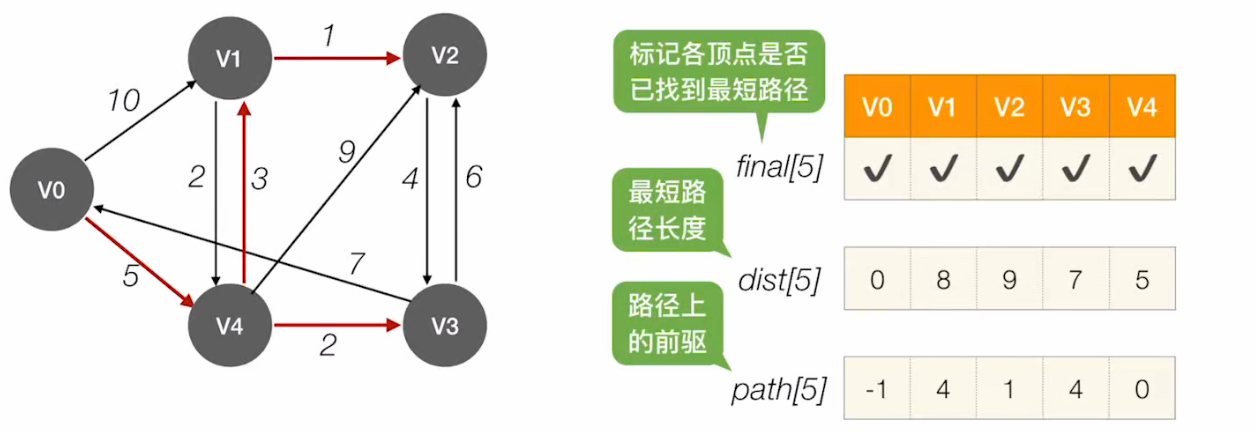
V0 到 V2 的最短 (带权) 路径长度为:dist [2] = 9;
通过 path [] 可知,V0 到 V2 的最短 (带权) 路径:V2 <-- V1 <-- V4 <-- V0
结论:Dijkstra 算法不适用于有负权值的带权图
3.Floyd算法
Floyd 多源最短路径
(1)原理
Floyd 算法:
求出每一对顶点之间的最短路径使用动态规划思想,将问题的求解分为多个阶段对于 n 个顶点的图 G,求任意一对顶点 Vi -> Vj 之间的最短路径可分为如下几个阶段:
#初始:不允许在其他顶点中转,最短路径是?
#0:若允许在 V₀中转,最短路径是?#1:若允许在 V₀、V₁中转,最短路径是?
#2:若允许在 V₀、V₁、V₂中转,最短路径是?
...
#n-1:若允许在 V₀、V₁、V₂……Vₙ₋₁中转,最短路径是?
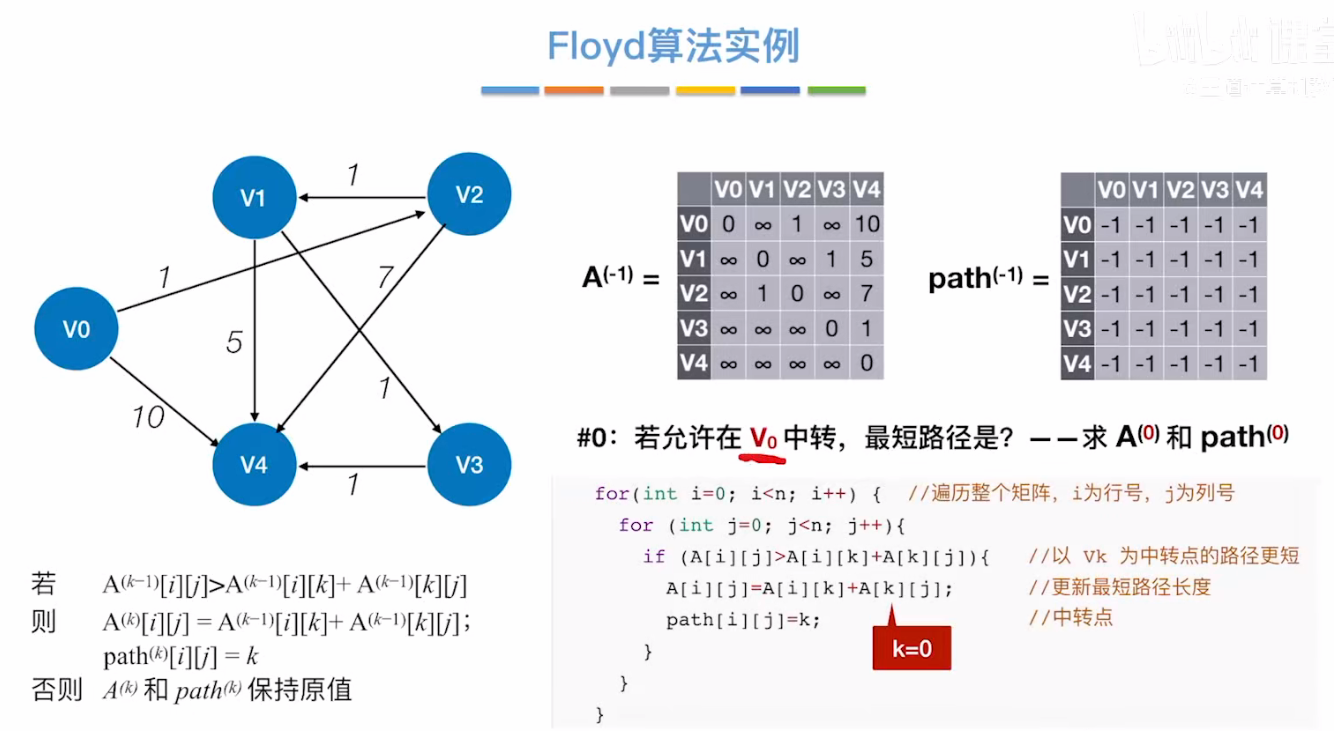
(2)代码
//……准备工作,根据图的信息初始化矩阵A和path(如上图)
for (int k=0; k<n; k++){ //考虑以Vk作为中转点
for(int i=0; i<n; i++) { //遍历整个矩阵,i为行号,j为列号
for (int j=0; j<n; j++){
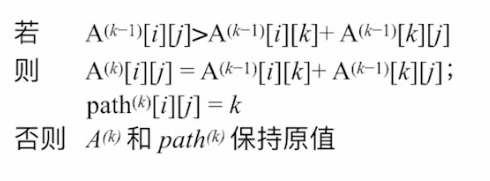
if (A[i][j]>A[i][k]+A[k][j]){ //以vk为中转点的路径更短
A[i][j]=A[i][k]+A[k][j]; //更新最短路径长度
path[i][j]=k; //中转点
}
}
}
}
(3)图解代码
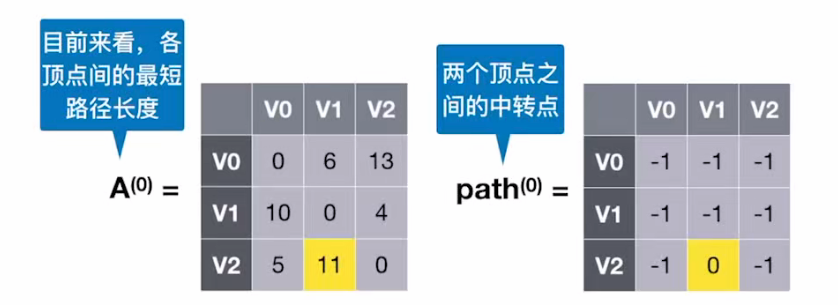
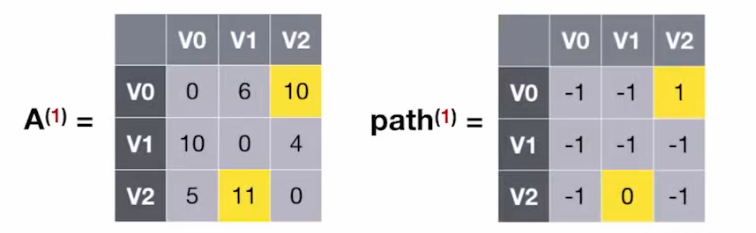
首先,由上图得到 A矩阵 和 path矩阵
 A矩阵就是图的邻接矩阵;
初始状态,都不存在中转顶点,初始为-1;
A矩阵就是图的邻接矩阵;
初始状态,都不存在中转顶点,初始为-1;
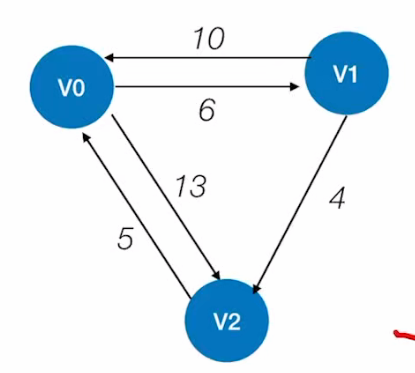
(4)示例
第 1 步:
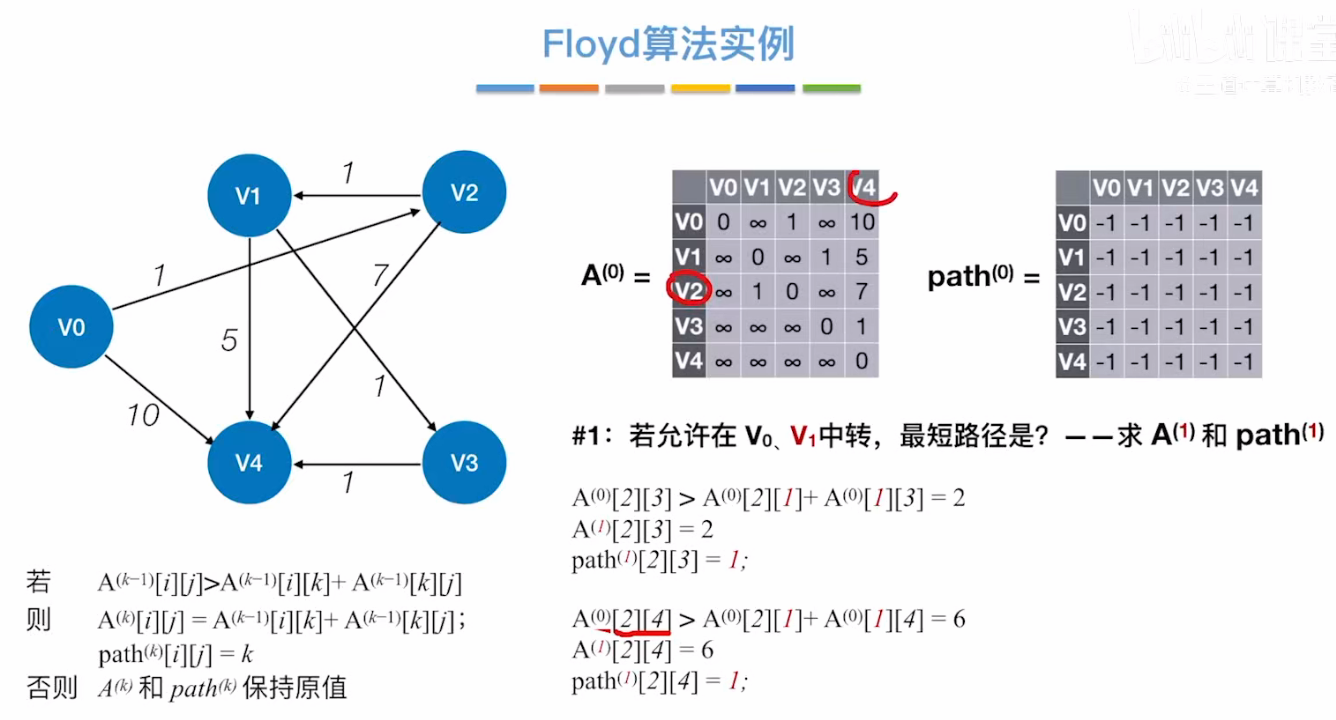
#0:若允许在 V₀中转,最短路径是?—— 求 A⁽⁰⁾和 path⁽⁰⁾
因为V2到V1没有直达的线,所以我们考虑使用V0做中转点;V2->V1->V0
 如上图:
将
如上图:
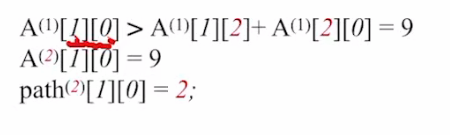
将 i=2,j=1,k=0 带入公式中;
得到:
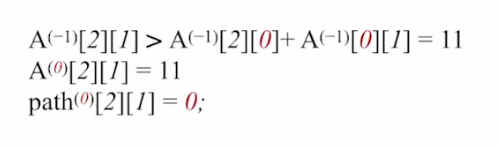 经过V0中转点后长度变为11,比原来的∞距离更近
经过V0中转点后长度变为11,比原来的∞距离更近
第 2 步:
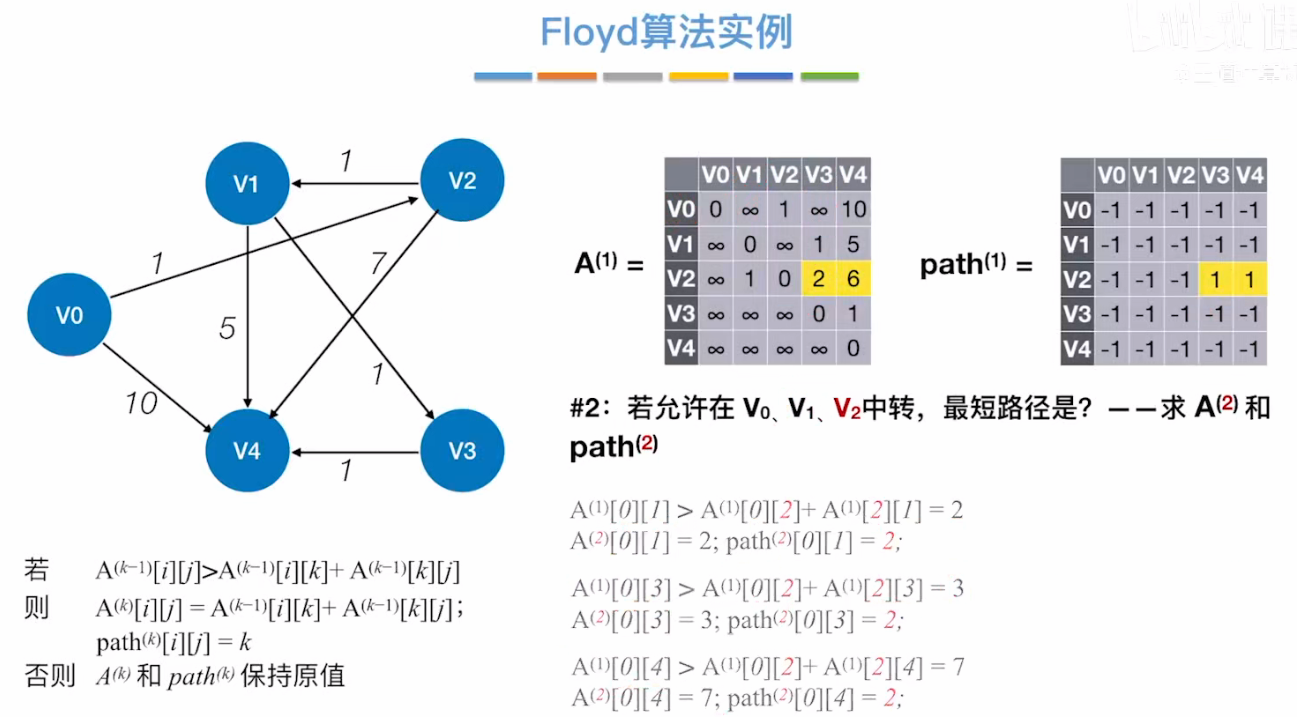
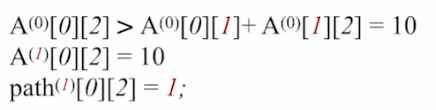
#1:若允许在 V₀、V₁中转,最短路径是?—— 求 A⁽¹⁾和 path⁽¹⁾
依次遍历各个顶点
第 3 步:
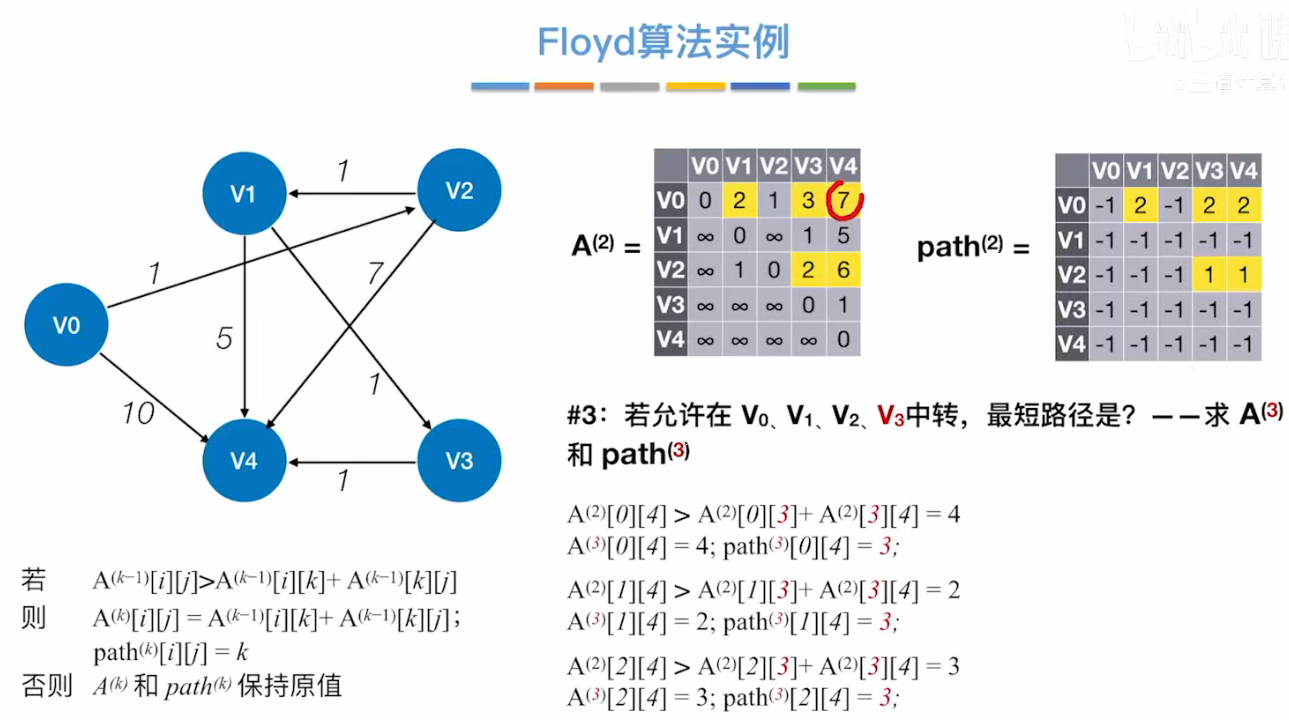
#2:若允许在 V₀、V₁、V₂中转,最短路径是?—— 求 A⁽²⁾和 path⁽²⁾
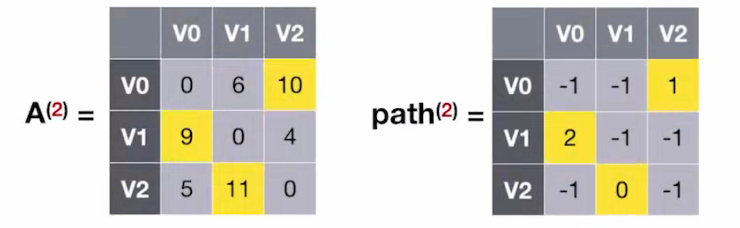

- 根据 A⁽²⁾可知,V1 到 V2 最短路径长度为 4,根据 path⁽²⁾可知,完整路径信息为 V1_V2
- 根据 A⁽²⁾可知,V0 到 V2 最短路径长度为 10,根据 path⁽²⁾可知,完整路径信息为 V0_V1_V2
- 根据 A⁽²⁾可知,V1 到 V0 最短路径长度为 9,根据 path⁽²⁾可知,完整路径信息为 V1_V2_V0
4.对比三种算法
以下是 BFS(无权图最短路径)、Dijkstra(单源带权无负权图)、Floyd(多源带权无负权/负权无环图) 三种最短路径算法的核心对比,用表格+通俗解读的形式呈现,方便理解和记忆:
| 对比维度 | BFS(广度优先搜索) | Dijkstra(迪杰斯特拉) | Floyd(弗洛伊德) |
|---|---|---|---|
| 适用场景 | 无权图 / 所有边权值相同的带权图 | 单源最短路径(一个起点→所有其他点)<br / />带权图(边权≥0,无负权) | 多源最短路径(任意两点间)<br / />带权图(可含负权边,但不能有负权环) |
| 核心思想 | 层层扩散,先访问的点就是最短路径(步数最少) | 贪心策略:每次选“当前离起点最近的未确定点”,更新其邻点距离 | 动态规划:逐步解锁中转点,尝试“i→k→j”替代“i→j”,更新最短距离 |
| 时间复杂度 | 邻接表:O(n+m)(n=顶点数,m=边数) 邻接矩阵:O(n²) | 邻接矩阵:O(n²) 邻接表+优先队列:O(m log n) | 固定O(n³)(三层循环:n个中转点×n行×n列) |
| 空间复杂度 | O(n)(队列+访问标记+距离/路径数组) | O(n)(距离数组+标记数组+路径数组) | O(n²)(距离矩阵A + 路径矩阵path) |
| 能否处理负权 | 仅支持无权/等权,无“负权”概念 | ❌ 不支持(负权会破坏贪心策略,导致结果错误) | ✅ 支持负权边(但负权环会导致路径长度无限缩短,无法求解) |
| 起点数量 | 单源(一次只能求一个起点的最短路径) | 单源 | 多源(一次求完所有点对的最短路径) |
| 实现难度 | 简单(基础遍历逻辑) | 中等(贪心+优先队列/数组找最小值) | 简单(三层循环,代码量极少) |
| 适用图类型 | 稠密/稀疏图均可(稀疏图更优) | 稀疏图(邻接表+优先队列)更优;稠密图(邻接矩阵)也可 | 稠密图更优(n小的时候效率可接受);n大时O(n³)效率极低 |
补充关键解读(避坑+选型建议):
BFS:
- 本质是“步数最短”,比如迷宫问题、社交网络好友推荐(最少好友链),边权必须相同才可用;
- 无法处理带权图(比如边权有1、2、3),因为“先访问”不一定是“距离最短”。
Dijkstra:
- 单源场景的首选(比如导航中“从我的位置到所有地点”),效率比Floyd高(尤其是稀疏图);
- 为什么不支持负权?比如:起点A→B=5,A→C=3,C→B=-1,贪心选C后会认为B的最短距离是2,但Dijkstra会先锁定B的距离5,错过更优解。
Floyd:
- 优势是“代码极简、多源求解”,适合顶点数少的场景(比如n≤100);
- 若n≥200,O(n³)会超时,此时建议对每个点跑一次Dijkstra(总复杂度O(n×m log n))更高效;
- 处理负权边时,需先检查图中是否有负权环(有则无解)。
选型口诀:
- 无权/等权图 → BFS;
- 单源、无负权、带权图 → Dijkstra;
- 多源、顶点少、可含负权(无环)→ Floyd;
- 有负权环 → 以上都不行,需用Bellman-Ford/SPFA。