八、线索二叉树讲解
线索二叉树讲解(含存储结构整合)
1、什么是线索二叉树
在普通二叉树中,存在大量空指针(叶子节点的左右指针为空,非叶子节点的部分子节点指针也为空)。线索二叉树是一种对二叉树的优化结构,它利用这些空指针来存储节点的“前驱”和“后继”信息(即该节点在某种遍历序列中的前一个和后一个节点),这些被利用的空指针称为“线索”。
2、存储结构设计(核心:标记位 + 指针域)
为了区分指针是“指向子节点”还是“指向线索”,线索二叉树的节点需增加两个标记位,结构如下(以C语言为例):
typedef struct ThreadedBinaryTreeNode {
int data; // 数据域
int ltag, rtag; // 左、右标记位(0=指向子节点,1=指向线索)
struct ThreadedBinaryTreeNode *lchild; // 左指针(子节点/前驱线索)
struct ThreadedBinaryTreeNode *rchild; // 右指针(子节点/后继线索)
} ThreadNode, *ThreadTree;
标记位约定:
| 标记位 | 值 | 指针含义 |
|--------|----|------------------------|
| ltag | 0 | 左指针指向左子节点 |
| ltag | 1 | 左指针指向前驱线索 |
| rtag | 0 | 右指针指向右子节点 |
| rtag | 1 | 右指针指向后继线索 |
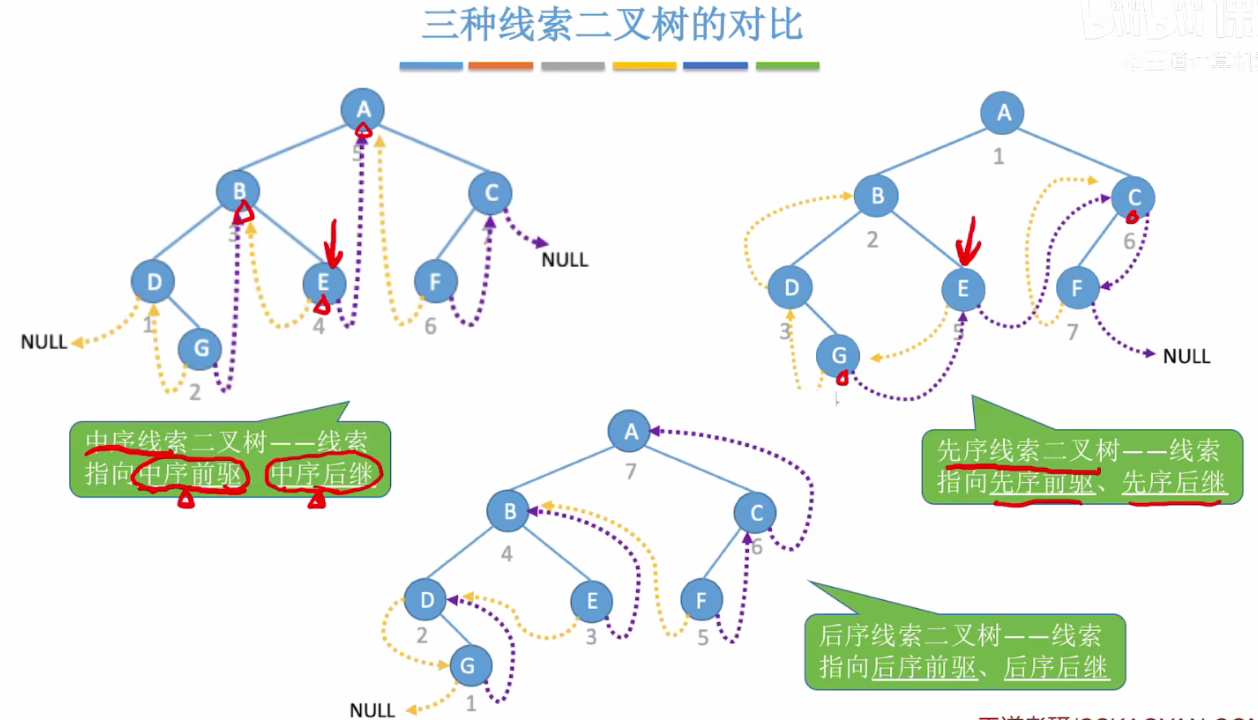
3、线索的分类与遍历关联
线索的指向逻辑与遍历序列类型(中序、前序、后序)强相关,不同遍历下“前驱/后继”的定义不同:
| 遍历类型 | 左线索(ltag=1时) | 右线索(rtag=1时) |
|---|---|---|
| 中序线索 | 中序遍历的前驱节点 | 中序遍历的后继节点 |
| 前序线索 | 前序遍历的前驱节点 | 前序遍历的后继节点 |
| 后序线索 | 后序遍历的前驱节点 | 后序遍历的后继节点 |
4、线索二叉树的构建(以中序线索化为例)
核心是在遍历过程中记录当前节点的前驱,并通过标记位和指针域建立线索关联。
递归实现步骤:
- 线索化左子树;
- 处理当前节点:
- 若左子树为空,设置
ltag=1,左指针指向前驱; - 若前驱的右子树为空,设置前驱的
rtag=1,右指针指向当前节点; - 更新前驱为当前节点;
- 若左子树为空,设置
- 线索化右子树。
5、遍历与存储结构的协同(以中序遍历为例)
利用线索可实现无递归、无栈的高效遍历(空间复杂度):
- 找中序第一个节点:从根节点出发,沿左指针循环,直到
ltag=1的节点; - 找后继节点:
- 若当前节点
rtag=1,直接沿右线索跳转; - 若
rtag=0,则找右子树的最左节点(中序遍历的后继逻辑);
- 若当前节点
- 循环直到节点为空。
6、工程扩展:带头节点的线索二叉树
为简化边界处理(第一个节点无前驱、最后一个节点无后继),可增加头节点:
- 头节点
ltag=0,lchild指向根节点; - 头节点
rtag=1,rchild指向中序最后一个节点; - 原树第一个节点的
lchild指向头节点(前驱线索); - 原树最后一个节点的
rchild指向头节点(后继线索)。
7、应用与存储特性
- 空间效率:仅增加2个整型标记位,复用个空指针,几乎无额外开销;
- 时间效率:遍历、前驱/后继查找的时间复杂度均为,且无递归/栈开销;
- 适用场景:静态二叉树(结构稳定)、需频繁遍历/查找前驱后继的场景(如二叉搜索树)。
示例(中序线索二叉树存储)
二叉树 A(D(B,E),C) 中序遍历为 B→D→E→A→C,其节点存储结构如下:
| 节点 | ltag | lchild | data | rchild | rtag |
|---|---|---|---|---|---|
| B | 1 | NULL | B | D | 1 |
| D | 0 | B | D | E | 0 |
| E | 1 | D | E | A | 1 |
| A | 0 | D | A | C | 0 |
| C | 1 | A | C | NULL | 1 |
线索二叉树通过“标记位+指针域”的存储设计,在不增加过多内存的前提下,实现了空指针的高效复用,是二叉树在遍历优化场景下的经典解决方案。